Project Summary:

“Little Guy, Big Dreams” - Balto the night before it deployed for the final run of the Tunnel Circuit (Photo Credit: Anushri Dixit)
This page is a home for all of my work automating large RC cars for the CoSTAR (Caltech/JPL) DARPA Grand Challenge team. The challenge is to produce a team of robots to autonomously explore a network of underground caverns and tunnels. The hope is that modifying RC cars will give us a faster and more robust midsize scout/scoring robot relative to the commercially available platforms.
During the Tunnels Circuit Balto was deployed as a communications node and traveled over 100 meters autonomously in support of our second place finish! We are now working to lower the center of mass, improve the sensor integration, and standardize the electronics with PCBs and better power management.
This project began as my ME75 project and continued into summer a SURF fellowship project. I was delighted and honored to work with Sasha Bodrova, Anushri Dixit and Nikhilesh Alatur this summer to make Balto a reality.
Related Article: http://www.pasadenanow.com/main/caltech-undergrads-build-robot-for-darpa-challenge/#.XegeGehKiUk
Hardware:
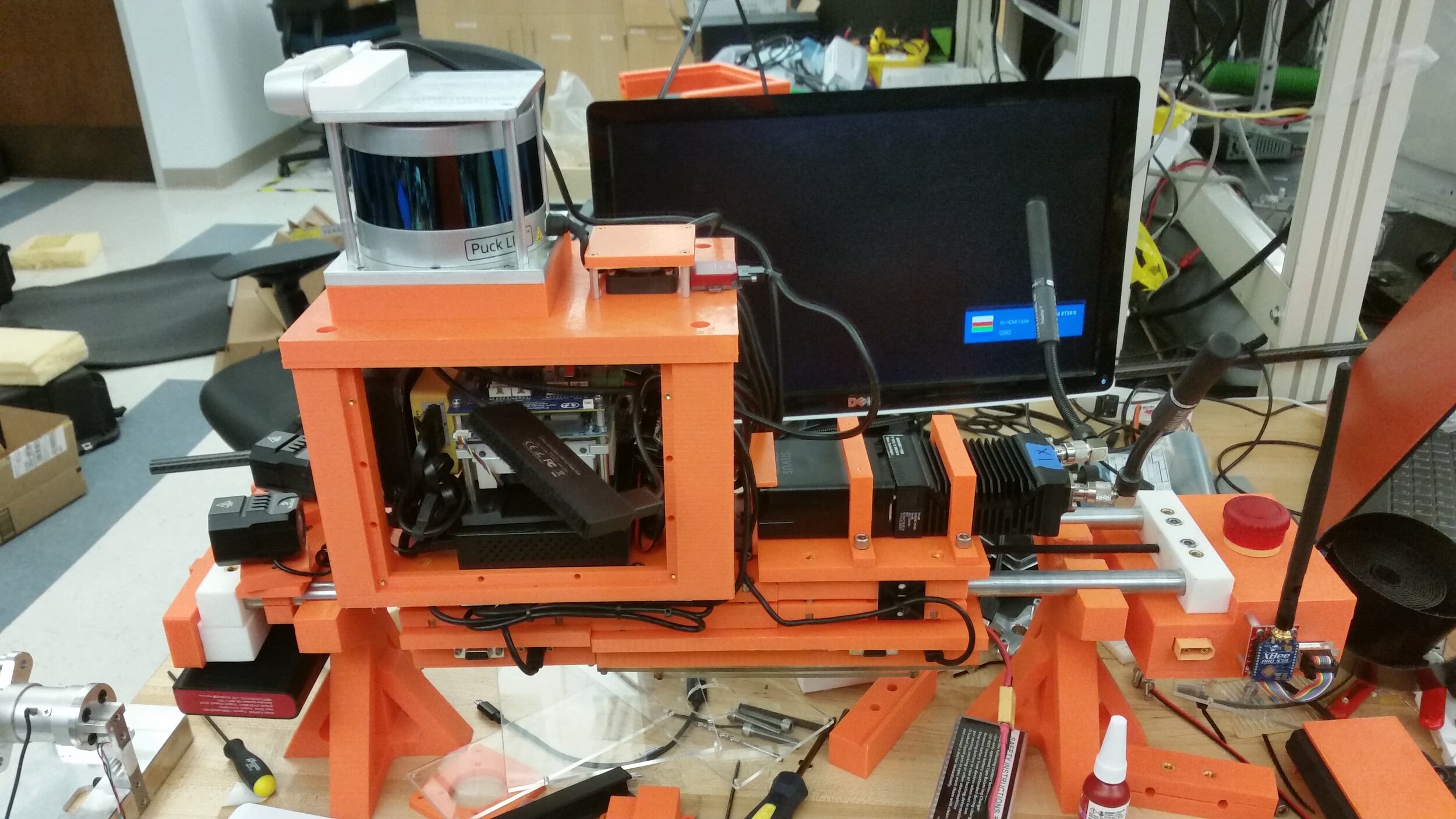
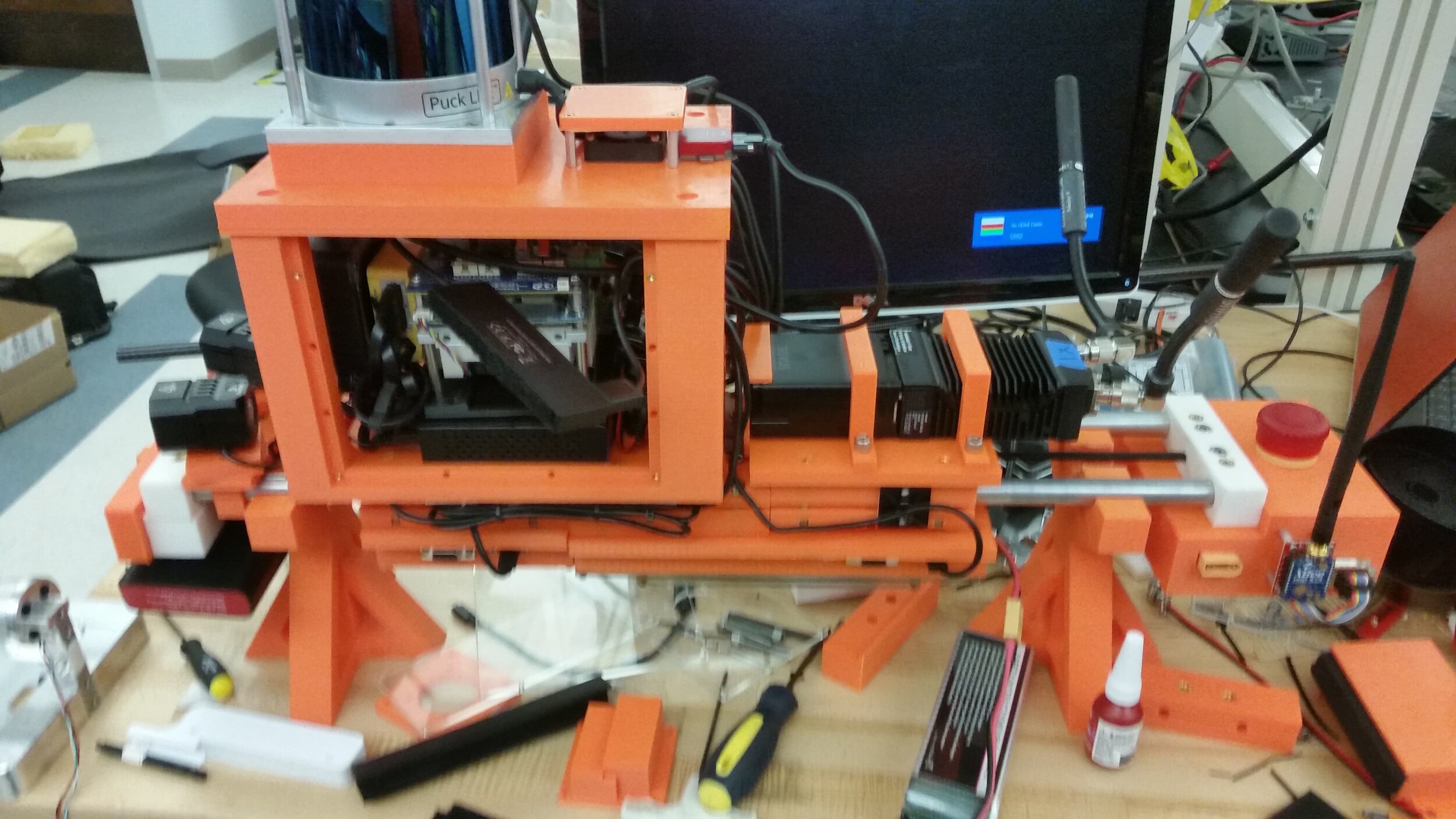
The V1 Crawler is built on a Traxxas XMAXX chassis, with the sensors, controllers, and interface hardware mounted on a “flying bridge” running the length of the robot. All of the housings are designed to be dust and splash resistant. The main computer is an intel NUC, which handles navigation, sensor processing, and drive control. The computer vision systems are run on a TX2 and use Intel Realsense 415s for data collection. Navigation vision is currently provided by a VLP-16 Lidar unit, with an Intel Realsense T265 to provide backup odometry. Power control and steering control are both managed by Teensy 3.2s. An ODrive is used to control the main drive motor.
All of the components of the V1 robot can be purchased commercially and modified with hand tools, or printed on a Craftbot+ 3D printer. In a few places we did use laser cut components for aesthetic reasons, but all of them can be printed if need be.
Software:
The robot runs ROS over Ubuntu with custom drivers for the steering, throttle, and e-stop systems. Navigation is handled by Movebase configured to handle Ackerman navigation using the timed elastic band (TEB) local planner.
Pictures:









Build Logs:




V0.1, This configuration was used throughout our development process and features separate housings for each component.

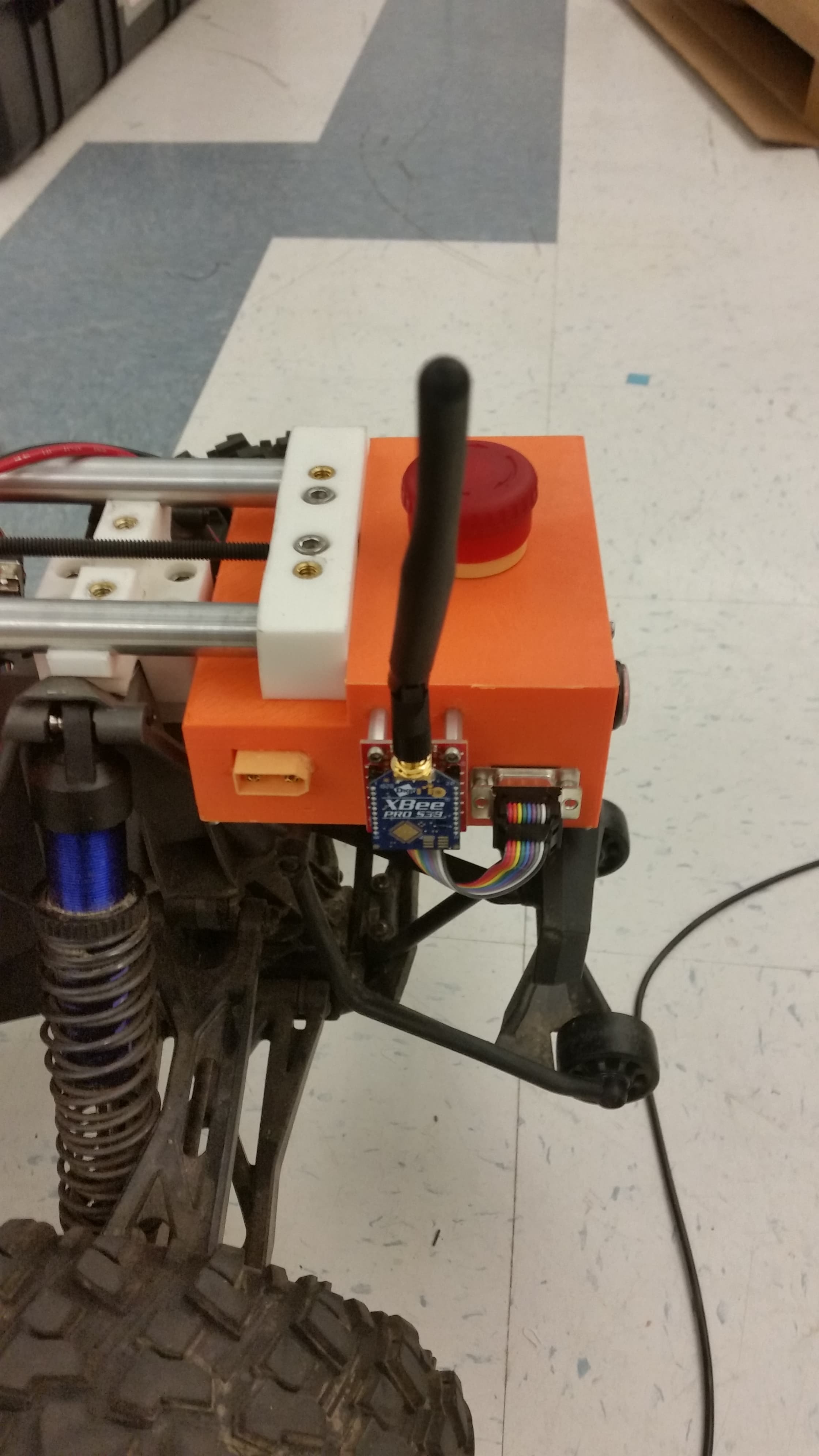
V1.0 (Balto), This was the version that we ran during the Tunnels Circuit. It features splash proof housings, a DARPA qualified emergency stop system, and revised/improved wiring throughout the robot.