Page Overview:

The completed inside of the steering module. I don’t love the force being exerted on the usb connector, but at least this way there’s minimal cycling.
This page documents the assembly process for version 1.2 of the Crawler’s steering module. This version is backwards compatible with V1.1, but now features panel mount IO ports to bring it in-line with the current generation of the O-Drive housing. We are considering this steering module to be “mud resistant” but it is in no way waterproof.
Note: For now I am not going to be posting code, or cads, for this project. With that said, if you are looking to make something similar please do message me and we can work something out (there’s a contact form on the “about” page).
Project Overview:
This post is part of my ongoing efforts to develop a new ground robot for Caltech’s/JPL’s DARPA challenge team. This year’s competition is to create a team of robots to explore an underground environment and report back a map, along with the location of specific objects inside the cave network.
Competition web-page: https://www.subtchallenge.com/
My specific project is to convert a Traxxas X-MAXX to be fully autonomous. It is hoped that the X-MAXX platform will be both faster, and more versatile, than the husky we use now (not to mention cheaper).
Build Process:
Notable Parts:
4-40 heat set inserts (8)
4-40x3/8 socket head cap screws (8)
Female nine pin D-Sub, panel mount, PN: A-DFF 09LPIII/Z
Female 10 pin ribbon cable header, PN: 61201023021
Male 10 pin header with shroud, PN: 61201021621
nine strand ribbon cable.
usb panel mount from Adafruit.


Assembly Steps:
Print the housing, lid, and drill jig. It is recommended that the wall and top/bottom thickness exceed 1.6mm. Infill should be set at greater than 15%.
Cut the proto-board to:
Place the proto-board beneath the drill jig. Use the jig to drill the 4 mounting holes, then cut the proto-board to size (being sure to leave at least 4 full rows to each side of the Teensy).
Install the heat-set inserts in the housing using a soldering iron.
Solder the pin-header in place with the notch facing the Teensy and then solder each pin as follows:
NC
NC
Connect to pin 6.
Connect to Teensy ground.
Connect to Teensy ground.
Connect to pin 3.
Connect to Teensy pin D5.
NC
NC
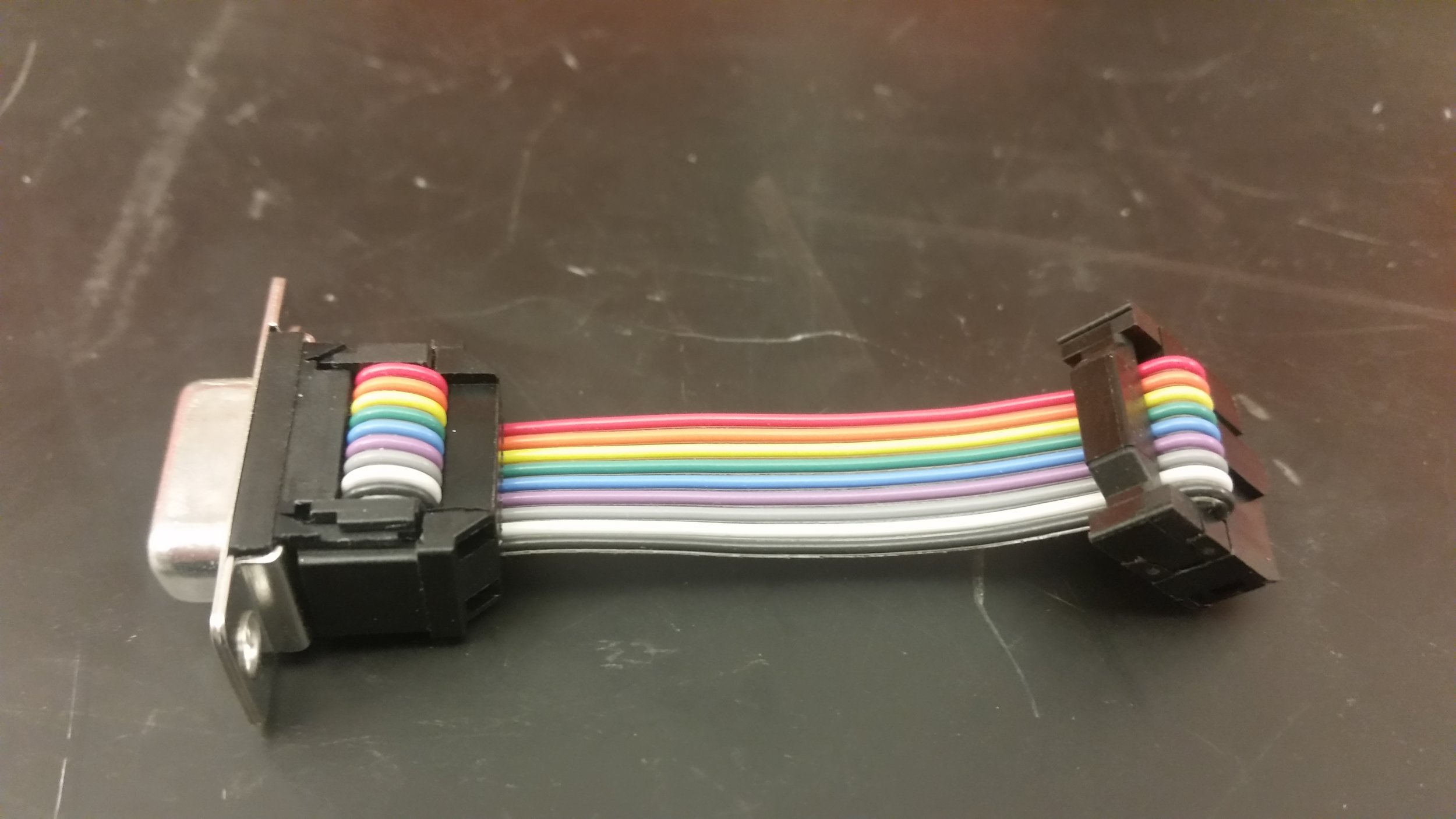
Assemble the D-Sub cable such that pin one of the D-Sub and pin one of the female pin header are connected. The pin header has a small triangle to mark pin one.
Install the D-Sub connector and panel mount usb. Coil and secure the USB cable as needed.
Test and Install!

V1.1 for comparison.

V1.2 of the steering module installed on our first robot.
Chassis Side:
In the robot chassis place a BEC (connected to the ODrive auxiliary power tap) and distribution board connected as follows.

The wiring from the 6 pin header to the two 3 pin headers.

I would strongly encourage closing the lid prior to testing…