Frog B version 1.0, it worked very well except for a tendency to sink like a rock if left unattended. Actually, it sank like a rock even if attended. Other than that it really did work well though…
The Summary:
ME72 is a 20 week robotics competition comprising 20 students, in 4 teams. This year’s map is amphibious, with three water zones, an island and several ramps. Each team fields 3 robots, with the goal of collecting and moving a number of floating balls.
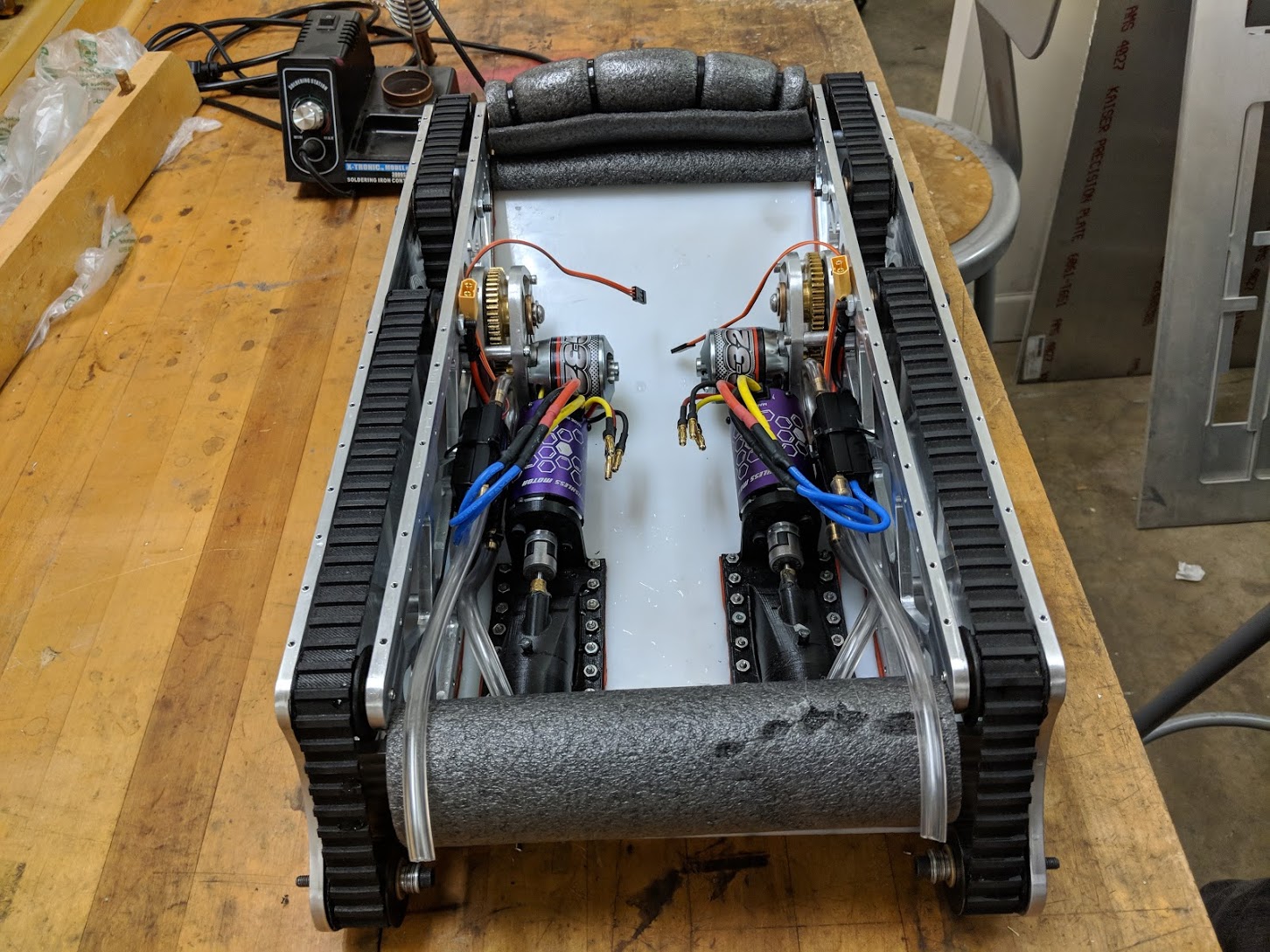
Our strategy at the moment revolves around two high-complexity amphibious vehicles and one simpler (but faster) water-only robot. The simple robot will likely be an air boat, and the two amphibious robots will use jets for water propulsion and treads for land mobility. (We did use this strategy)
My Learning Goals:
Get experience with fabricating high-quality, well engineered parts in the shop. In particular, I want to move away from manual machining for as much of this project as possible.
Get experience working with modern microprocessor architectures for simple controls and robotics applications.
Get experience sharing CAD and CAM projects with others in a productive and pleasant manner.
Build Logs:








Adding an iso-grid to our outer hull panels cut weight down by nearly a pound relative to version 1, and increased the strength significantly at the same time.
Team:
I am honored and thrilled to work with the following fantastic engineers:
Lewis Jones
Jack Caldwell
Ricky Hamel
Kanan Mehta
Summary of Results:
Well… the final demo could have gone better. We were tweaking our robots right up until the end, and never quite got either of the tank-bots reliable enough to make it all the way through a match. The air boat fared a bit better, but we swapped it’s motor at the last minute leaving it under powered. Still, the build process was amazing, and the class’s conclusion ought to be an enduring lesson in the importance of making (and sticking to) fallback plans and feature freezes.
This project (and class) has wrapped up, so I’m in the process of writing up the associated posts.
Last updated: 5/2/2021 (class finished 2018/2019)